
What is GPS?
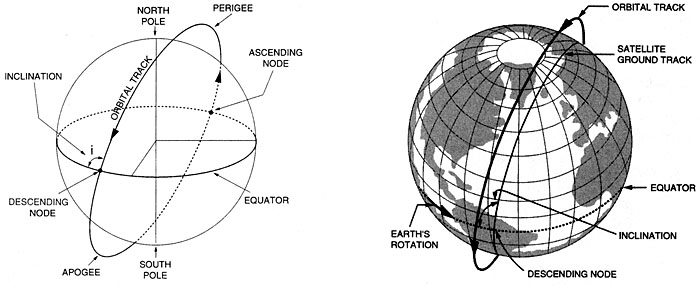
The global positioning system is a satellite-based navigation system consisting of a network of 24 orbiting satellites that are eleven thousand nautical miles in space and in six different orbital paths. The satellites are constantly moving, making two complete orbits around the Earth in just under 24 hours. If you do the math, that’s about 2.6 kilometers per second. That’s really moving!
The GPS satellites are referred to as NAVSTAR satellites. Of course, no GPS introduction would be complete without learning the really neat stuff about the satellites too! The first GPS satellite was launched way back in February, 1978.
Each satellite weighs approximately 1 tonne and is about 5 metres across with the solar panels extended. Transmitter power is only 50 watts, or less!
Each satellite transmits on three frequencies. Civilian GPS uses the ‘L1’ frequency of 1575.42 MHz.
Each satellite is expected to last approximately 10 years. Replacements are constantly being built and launched into orbit. The satellite orbits are roughly 25,000 kilometers from the earth’s centre, or 20,000 kms above the earth’s surface.
The orbital paths of these satellites take them between roughly 60 degrees North and 60 degrees South latitudes. What this means is you can receive satellite signals anywhere in the world, at any time. As you move closer to the poles (on your next North Pole or Antarctic expedition!), you will still pick up the GPS satellites. They just won’t be directly overhead anymore. This may affect the satellite geometry and accuracy but only slightly.
One of the biggest benefits over previous land-based navigation systems is GPS works in all weather conditions. No matter what your application is, when you need it the most, when you’re most likely to get lost, your GPS receiver will keep right on working, showing right where you are!  How did the technology evolve? You know from your history books that Mr Marconi figured greatly in the understanding of the electro-magnetic energy we know as radio. This technology was applied during the 1920’s by the establishment of radio stations, for which you needed a receiver. The same applies for GPS- you only need a rather special radio receiver. Significant advances in radio were bolstered by large sums of money during and after the Second World War (for eavesdroppping and communications necessities), and were even more advanced by the need for communications with early satellites and rockets, and general space exploration. The technology to receive radio signals in a small hand-held, from 20,000kms away, is indeed amazing.
How did the technology evolve? You know from your history books that Mr Marconi figured greatly in the understanding of the electro-magnetic energy we know as radio. This technology was applied during the 1920’s by the establishment of radio stations, for which you needed a receiver. The same applies for GPS- you only need a rather special radio receiver. Significant advances in radio were bolstered by large sums of money during and after the Second World War (for eavesdroppping and communications necessities), and were even more advanced by the need for communications with early satellites and rockets, and general space exploration. The technology to receive radio signals in a small hand-held, from 20,000kms away, is indeed amazing.
So what information does a GPS satellite transmit? The GPS signal contains a ‘pseudo-random code’, ephemeris (pronounced: ee-fem-er-iss) and almanac data. The pseudo-random code identifies which satellite is transmitting – in other words, an I.D. code. Ephemeris data is constantly transmitted by each satellite and contains important information such as status of the satellite (healthy or unhealthy), current date, and time. Without this part of the message, your GPS receiver would have no idea what the current time and date are. This part of the signal is essential to determining a position, as we’ll see in a moment.
The almanac data tells the GPS receiver where each GPS satellite should be at any time throughout the day. Each satellite transmits almanac data showing the orbital information for that satellite and for every other satellite in the system.
By now the overall picture of how GPS works should be getting much clearer. (Clear as mud, right?) Each satellite transmits a message which essentially says, “I’m satellite #X, my position is currently Y, and this message was sent at time Z.” Of course, this is a gross oversimplification, but you get the idea. Your GPS receiver reads the message and saves the ephemeris and almanac data for continual use. This information can also be used to set (or correct) the clock within the GPS receiver.
Now, to determine your position the GPS receiver compares the time a signal was transmitted by a satellite with the time it was received by the GPS receiver. The time difference tells the GPS receiver how far away that particular satellite is. If we add distance measurements from a few more satellites, we can triangulate our position. This is exactly what a GPS receiver does. With a minimum of three satellites, your GPS receiver can determine a latitude/longitude position – what’s called a 2D position fix. With four or more satellites, a GPS receiver can determine a 3D position which includes latitude, longitude, and altitude. By continuously updating your position, a GPS receiver can also accurately provide speed and direction of travel (referred to as ‘ground speed’ and ‘ground track’).
Accuracy is a relative term of course. If you want to locate a fishing spot, 10 metres is probably fine. But if you want to determine a survey boundary peg, we might need 2 cms. 10 metres, as it happens is fairly typical of current GPS accuracy (since 1 May 2000). The first source of position error used to be Selective Availability (or SA), but as of 1 May 2000, this was deliberately cancelled. SA created inaccuracies up to 100 metres in an intentionally-imposed degradation on the accuracy of civilian GPS by the U.S. Department of Defense. The rationale behind SA was to deny hostile military or terrorist organizations the maximum accuracy benefits of GPS. Now that SA is gone, we can look forward to more productive and safer use of GPS.
Other factors will effect accuracy, but may become significant only when looking for accuracies better than 10-15 metres. These factors are satellite geometry (relative positions of each satellite in the sky, units expressed as DOP), multi-pathing (where satellite reception is blocked or reflected by buildings etc), and propagation delay due to atmospheric effects. There will also be internal clock errors. These latter errors will normally have no significance for 10-15 metre users.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}